bash
utf8
线性代数
service_mesh
测试用例
网络技术
dirs 命令
引用
Java开发
PID算法
软件定义汽车
ThingsBoard
Pyinstaller
paas
系统架构
IT难
征信报告
libpq
三星刷机
二元操作符
RTK
2024/4/21 23:48:37
RTKLIB源码解析(一)、单点定位(pntpos.c)
目录
pntpos
satposs estpos raim_fde
estvel
ephclk
satpos satsys
seleph
eph2clk
ephpos
eph2pos rescode lsq
valsol
matmul
dops
ecef2enu
xyz2enu
ecef2pos
geodist
satazel
prange
satexclude
ionocorr
tropcorr
varerr
testsnr
gettgd
ionmod…

惯性传感器、磁力计、IMU、INS、GNSS、RTCM、RTK、双天线测向的定义
惯性传感器 Inertial Sensor (IS)陀螺仪:输出三轴角速度原始数据 加速度计加速度计:输出三轴加速度原始数据磁力计 Magnetometer输出三轴磁力计数据,可以测量地球磁场强度从而推算出磁航向惯性测量单元 Inertial Measurement Unit …
NtripShare Caster高精度定位CORS服务软件
NtripShare CORS是NtripShare GNSS系列软件中最早的软件系统,也是NtripShare名称的起源。
所谓GNSS CORS服务系统一般构成:
1)基准站网:由若干个分布合理的GNSS 基准站组成;
2)数据传输系统:…

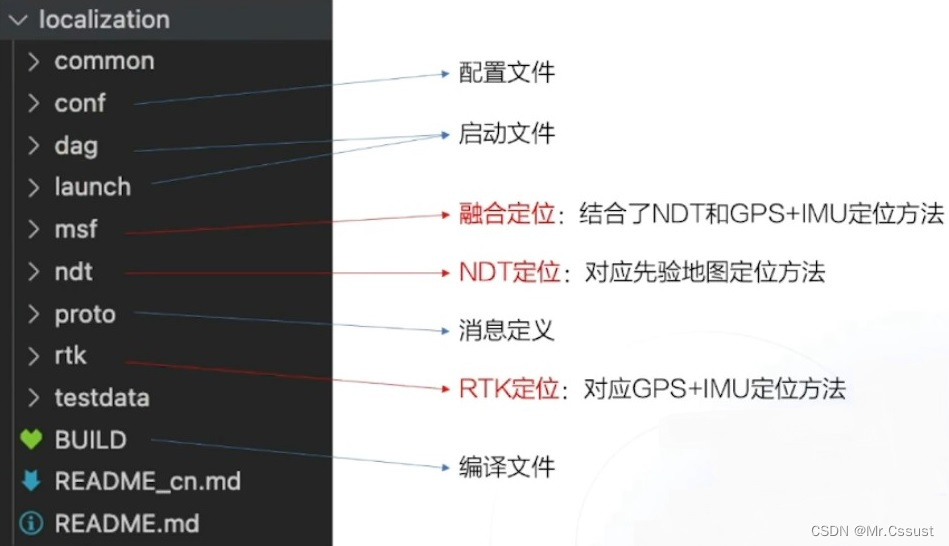
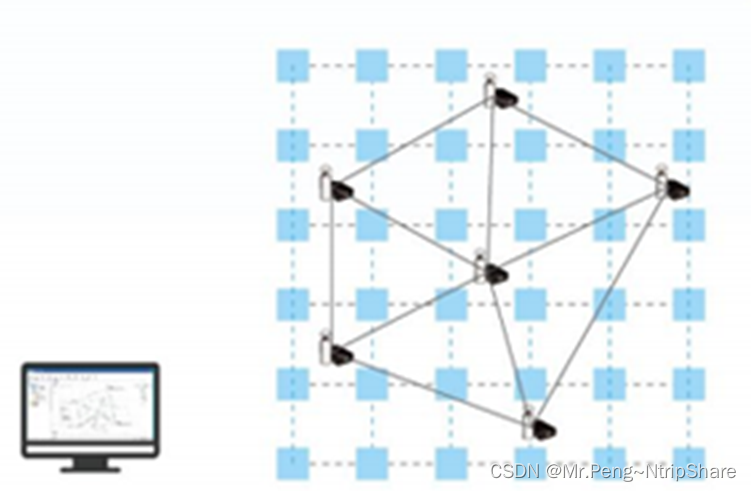
自动驾驶学习笔记(十二)——定位技术
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
卫星定位
RTK定位
IMU定位
GNSS定…

第三讲GNSS相关时间系统和转换 第四讲观测值的产生和分类 | GNSS(RTK)课程学习笔记day2
说明:以下笔记来自计算机视觉life吴桐老师课程:从零掌握GNSS、RTK定位[链接],从零掌握RTKLIB[链接]。非原创!且笔记仅供自身与大家学习使用,无利益目的。 第三讲 GNSS相关时间系统和转换
GPS卫星的位置在时间过程中是…

第五讲观测值中与卫星、接收机有关的误差 第六讲观测值中与信号传播路径有关的误差以及电离层、对流层相关模型 | GNSS(RTK)课程学习笔记day3
说明:以下笔记来自计算机视觉life吴桐老师课程:从零掌握GNSS、RTK定位[链接],从零掌握RTKLIB[链接]。非原创!且笔记仅供自身与大家学习使用,无利益目的。 第五讲 观测值中与卫星、接收机有关的误差 卫星轨道误差
由卫…
北斗导航 | 从事卫星导航工作需要知道的基本算法
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545
===================================================== 从事卫星导航工作需要了解的基本算法 注意:一:引言二:常见算法介绍三…